Mixed-Signal Guitar Effects Pedal – Real-Time Embedded DSP Platform
Independent Project · Embedded Audio Systems · 2025–Present
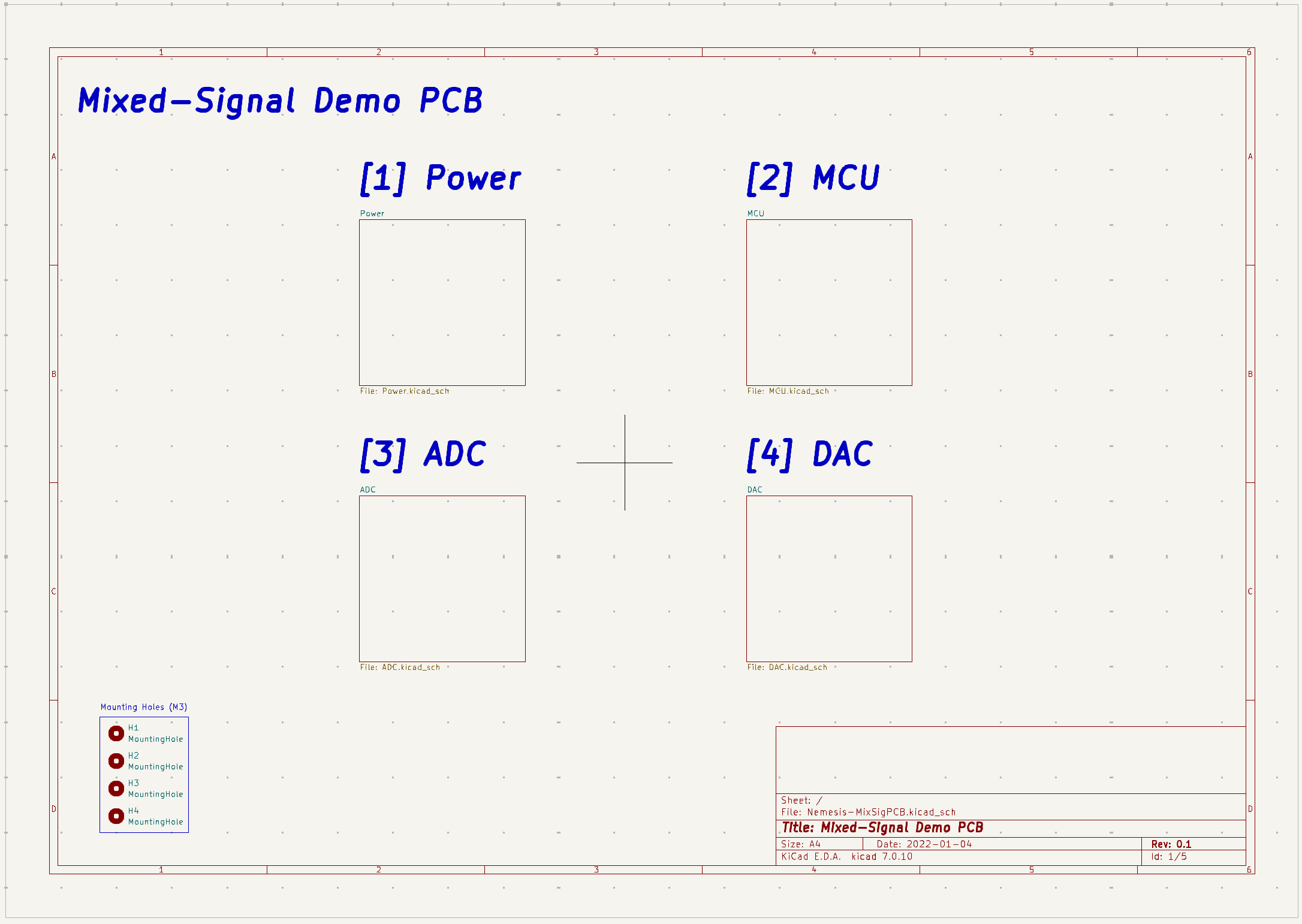
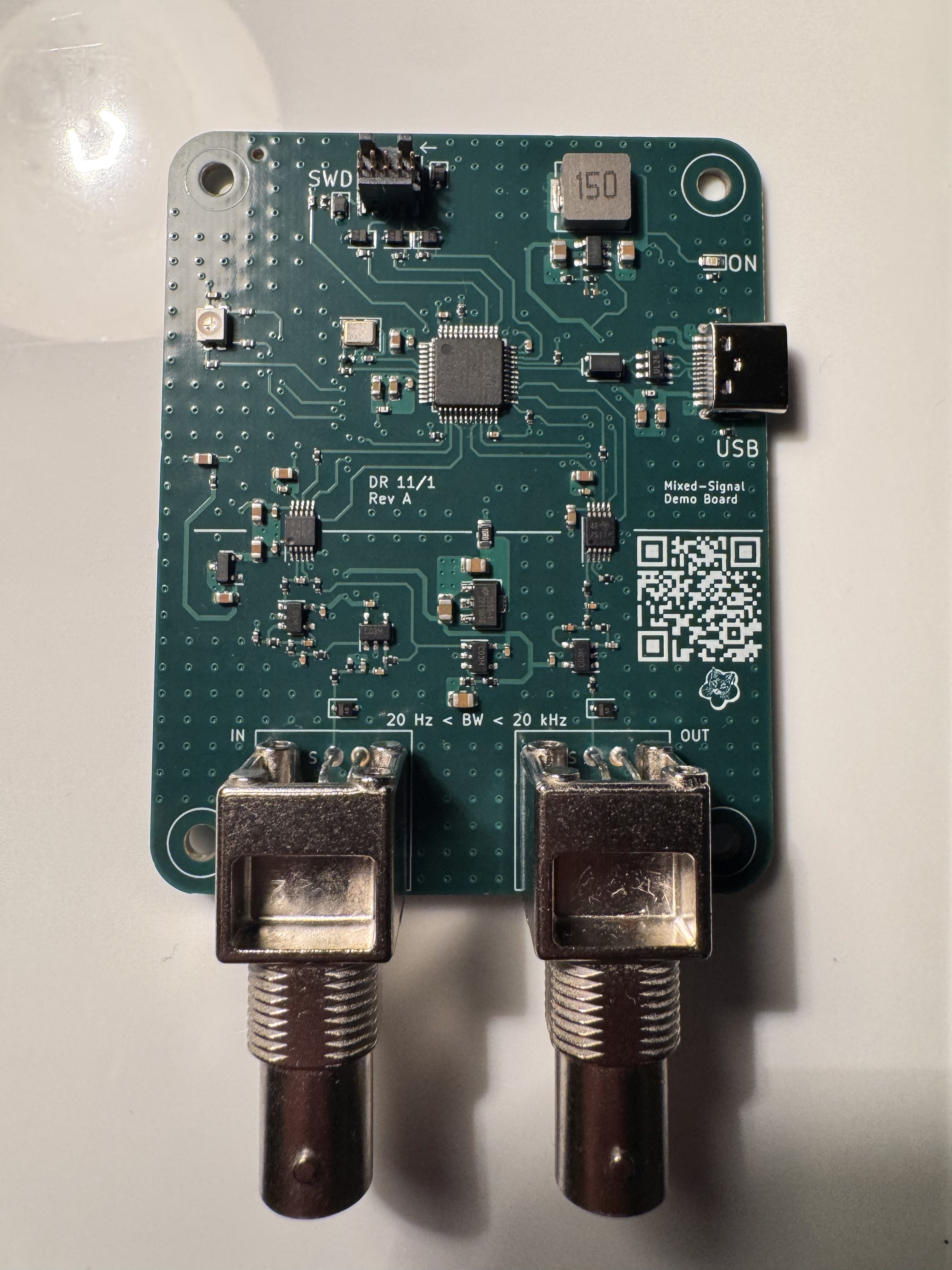
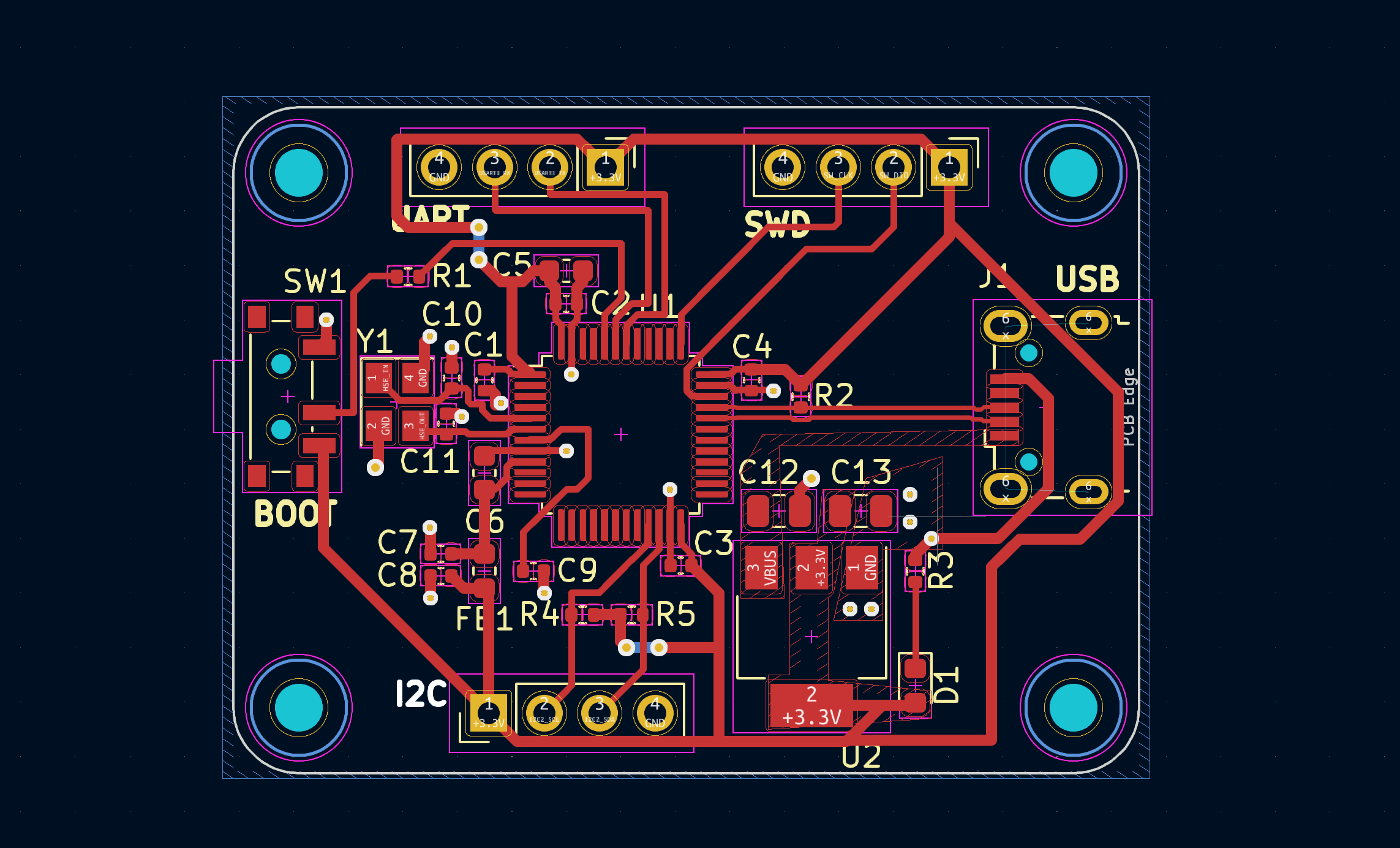
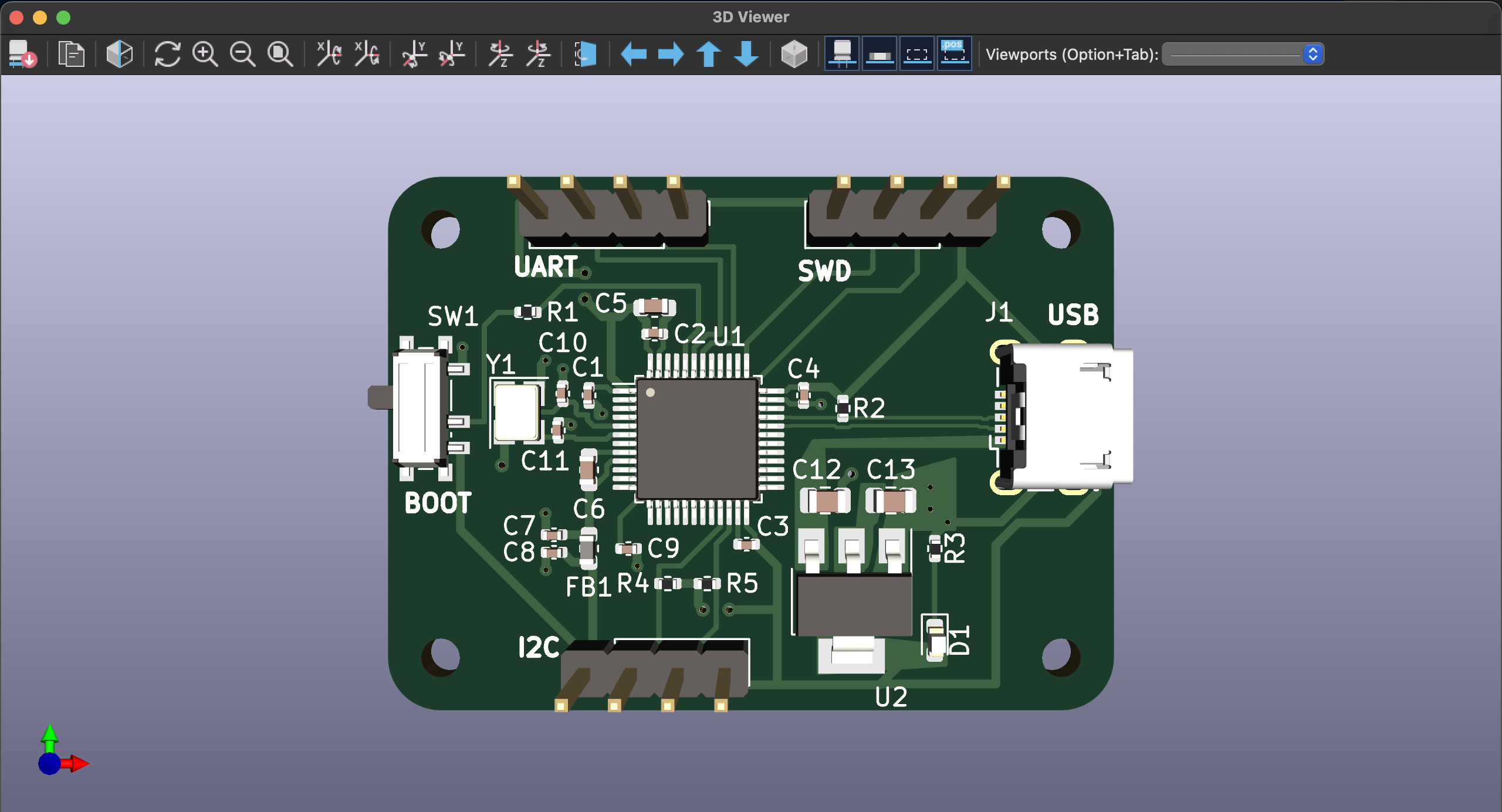
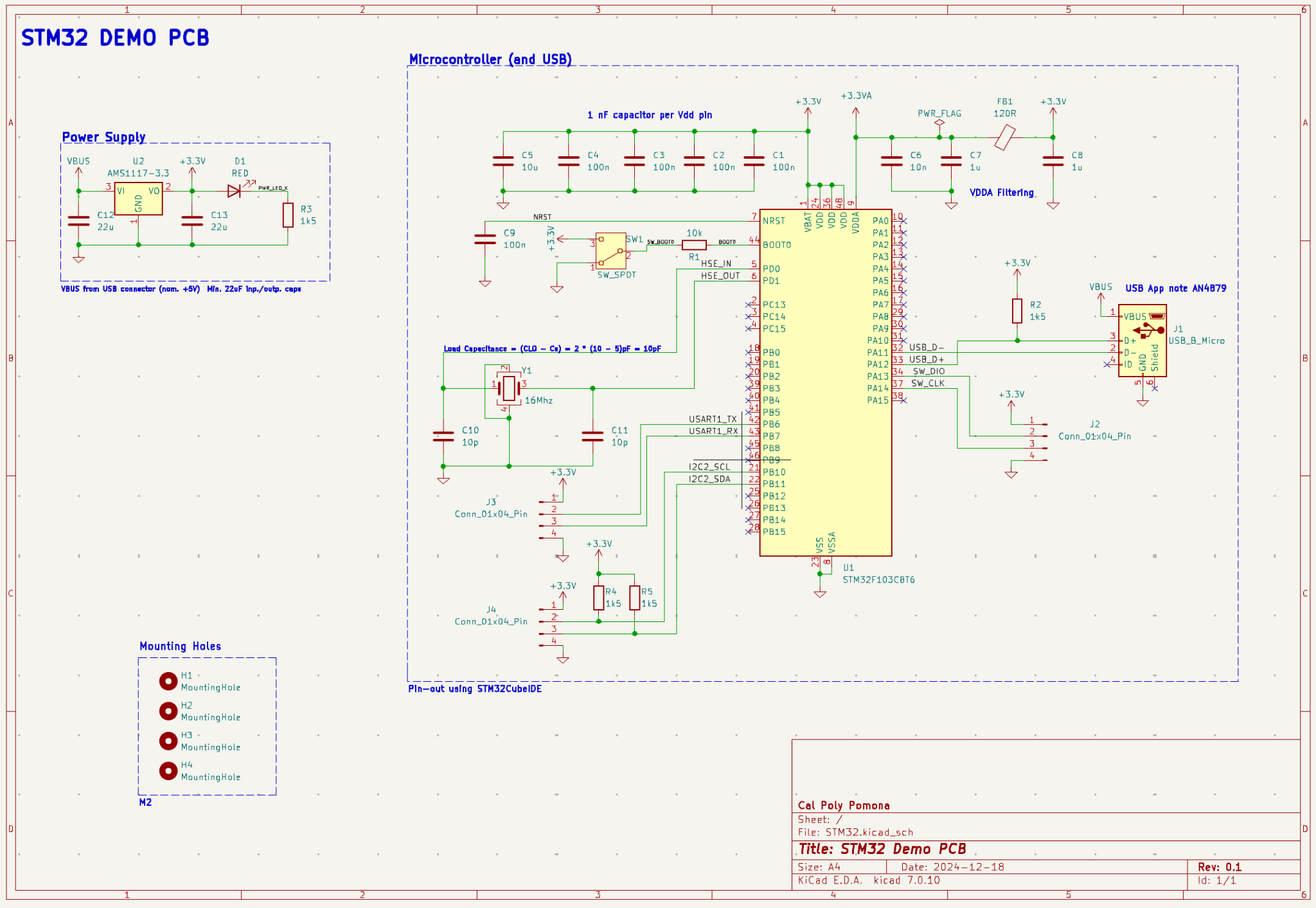
This project is the end-to-end design and bring-up of a custom 4-layer mixed-signal embedded platform for real-time audio acquisition,
digital signal processing, and playback. The system interfaces an external high-resolution ADC and DAC with an STM32 microcontroller
to implement a standalone programmable guitar effects pedal operating without a host PC.
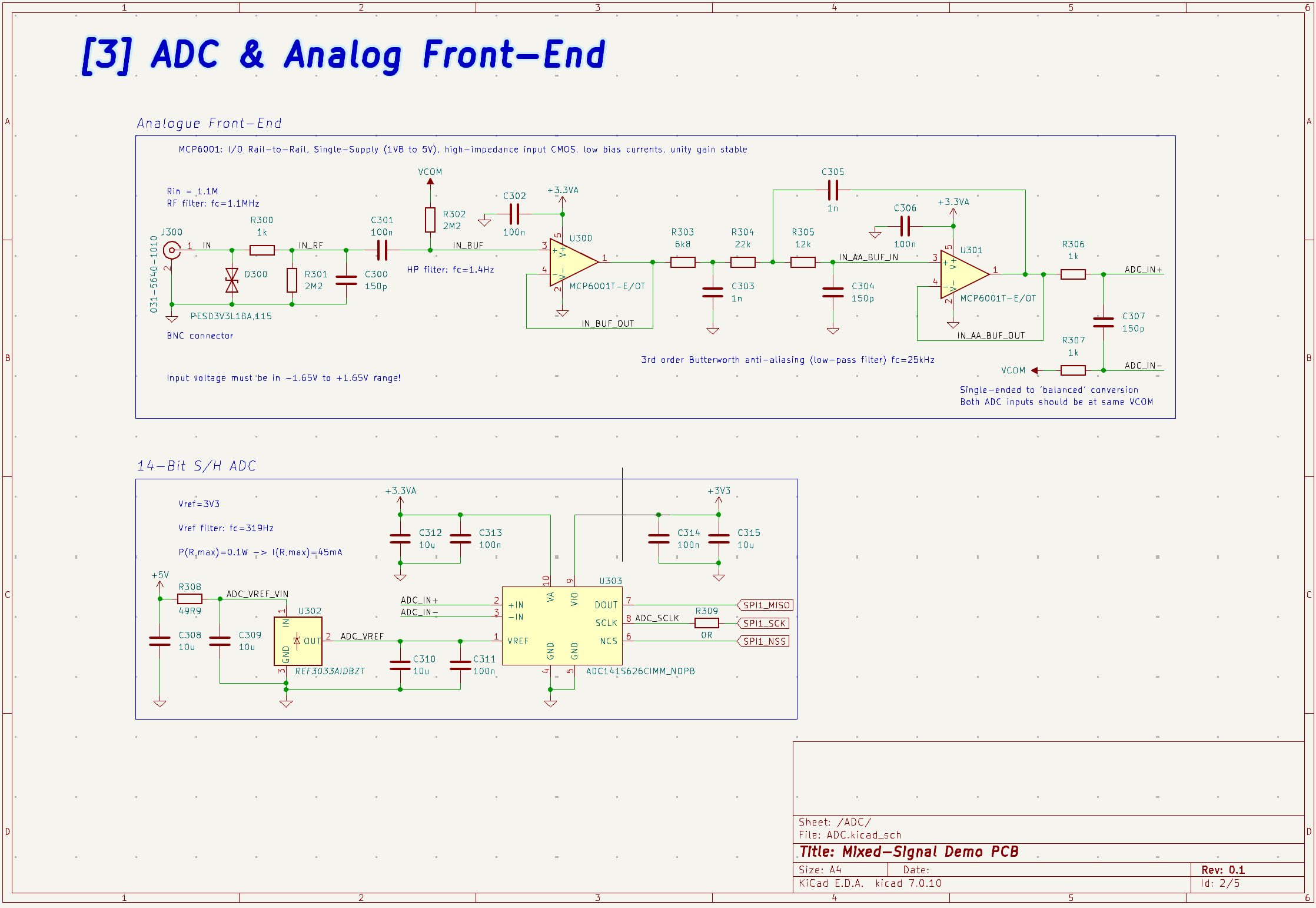
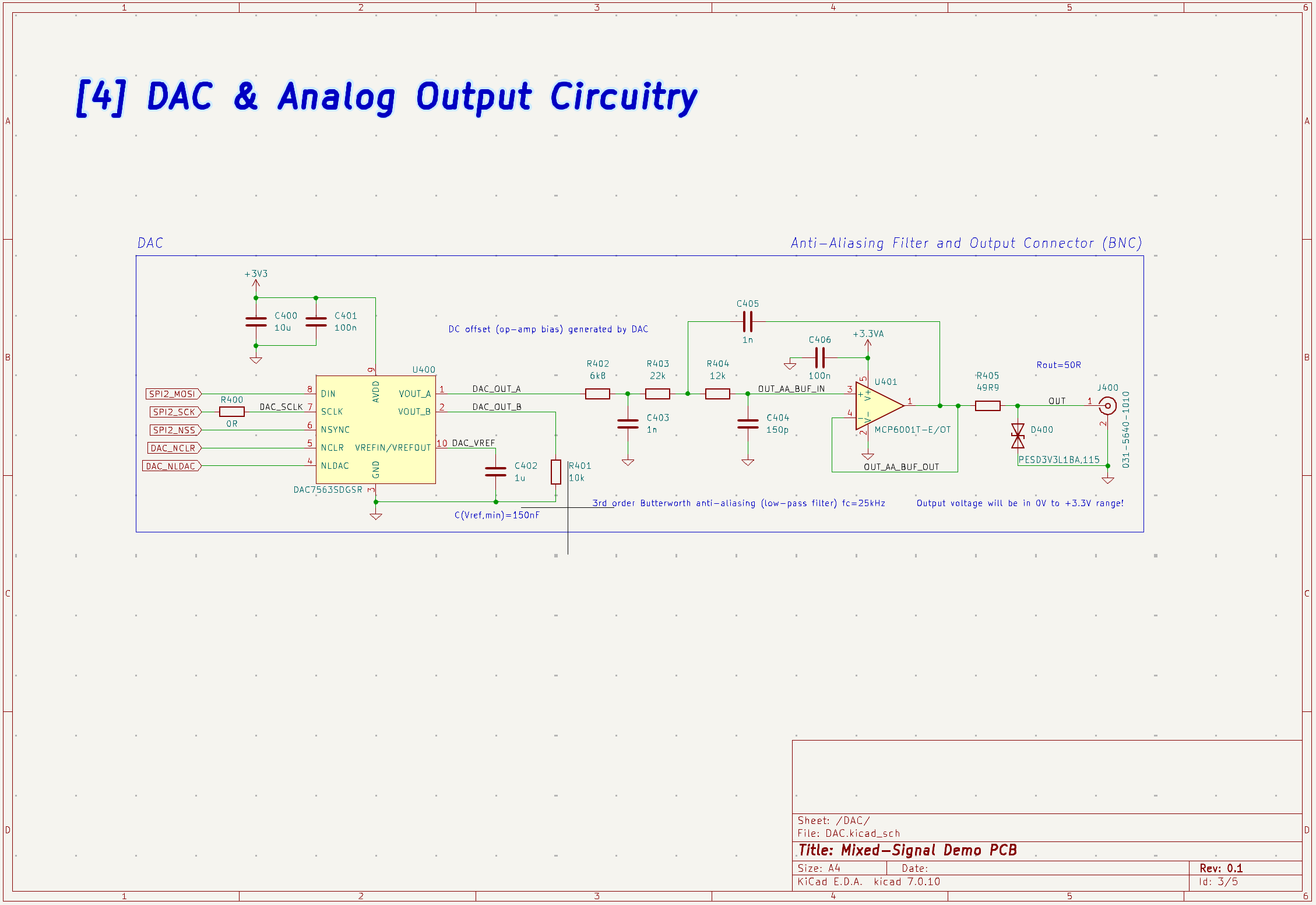
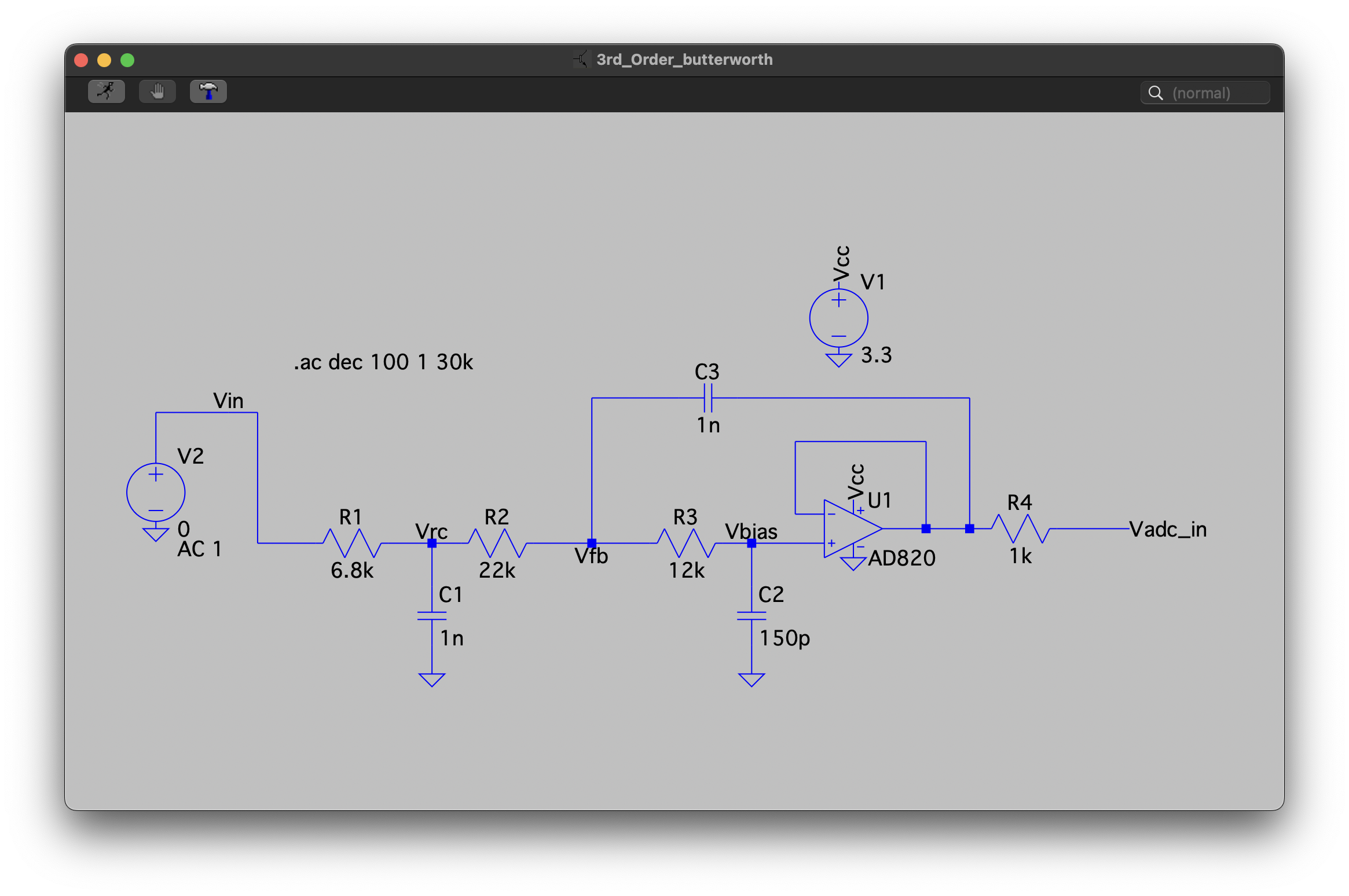
The analog front end provides a high-impedance guitar input stage, precision biasing, and a 3rd-order Butterworth anti-aliasing filter
to condition signals prior to conversion. Reconstruction filtering and low-noise buffering are used on the output path to suppress
imaging artifacts and maintain low distortion across the audible band. The PCB stack-up and layout emphasize controlled return paths,
analog-digital domain isolation, low-impedance grounding, and consistent impedance to minimize coupling between sensitive analog
circuitry and high-speed digital switching.
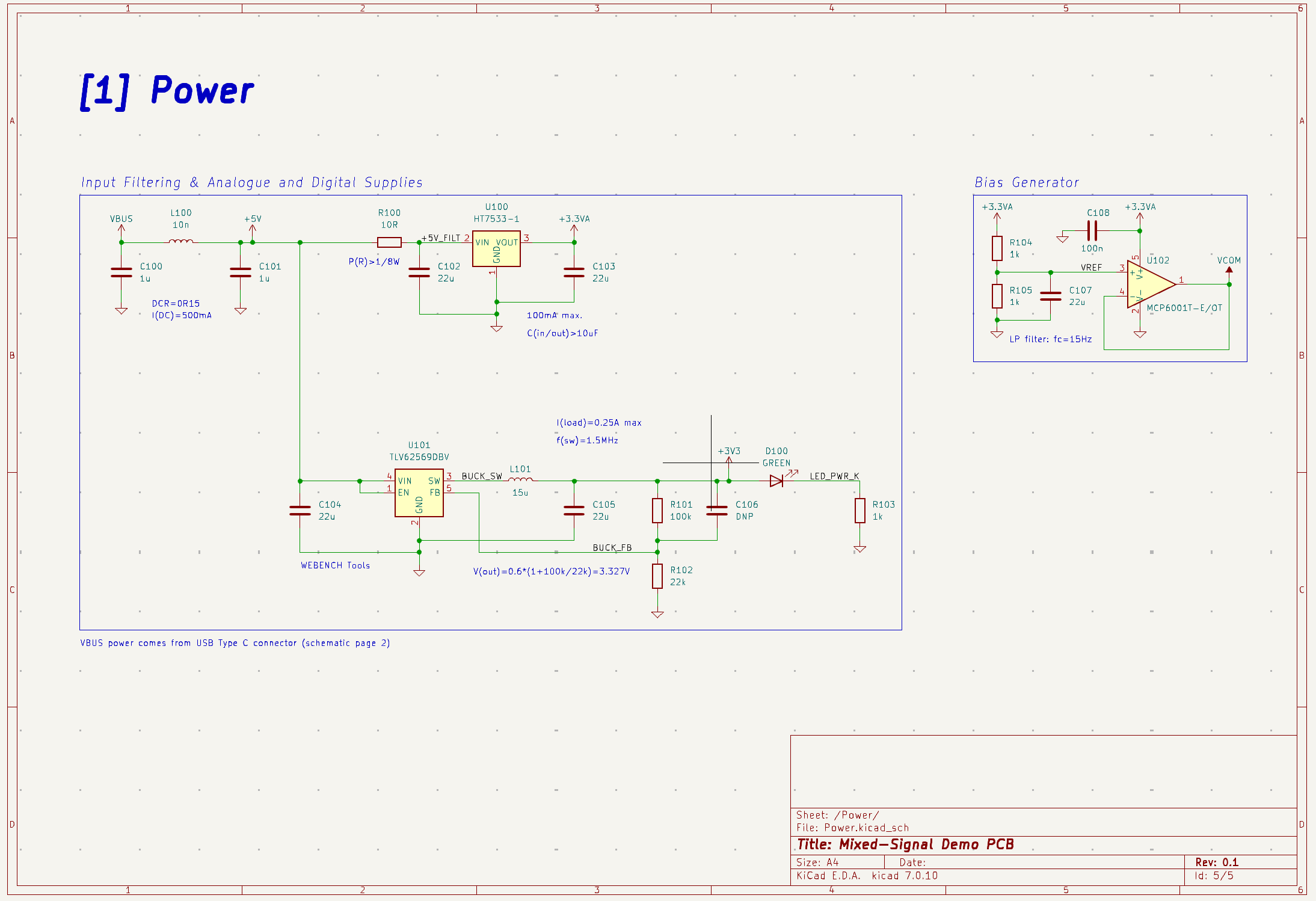
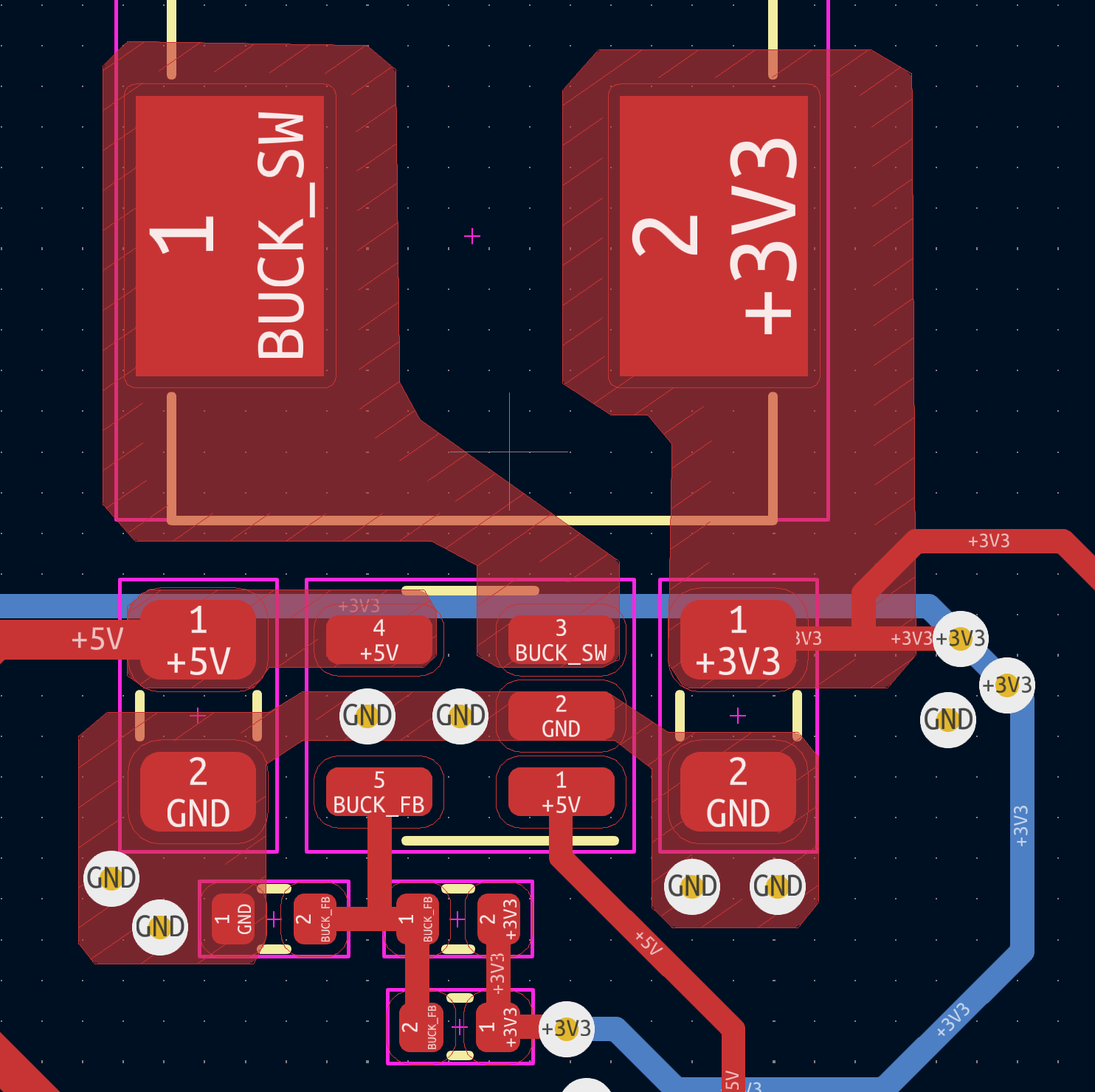
Power delivery is implemented using a USB-C input feeding a multi-rail regulation architecture to support low-noise analog supplies
and regulated digital rails. All power stages and filter networks were simulated and verified in LTspice prior to layout. Decoupling
and bypass networks were optimized for each device to ensure supply stability under dynamic load conditions.
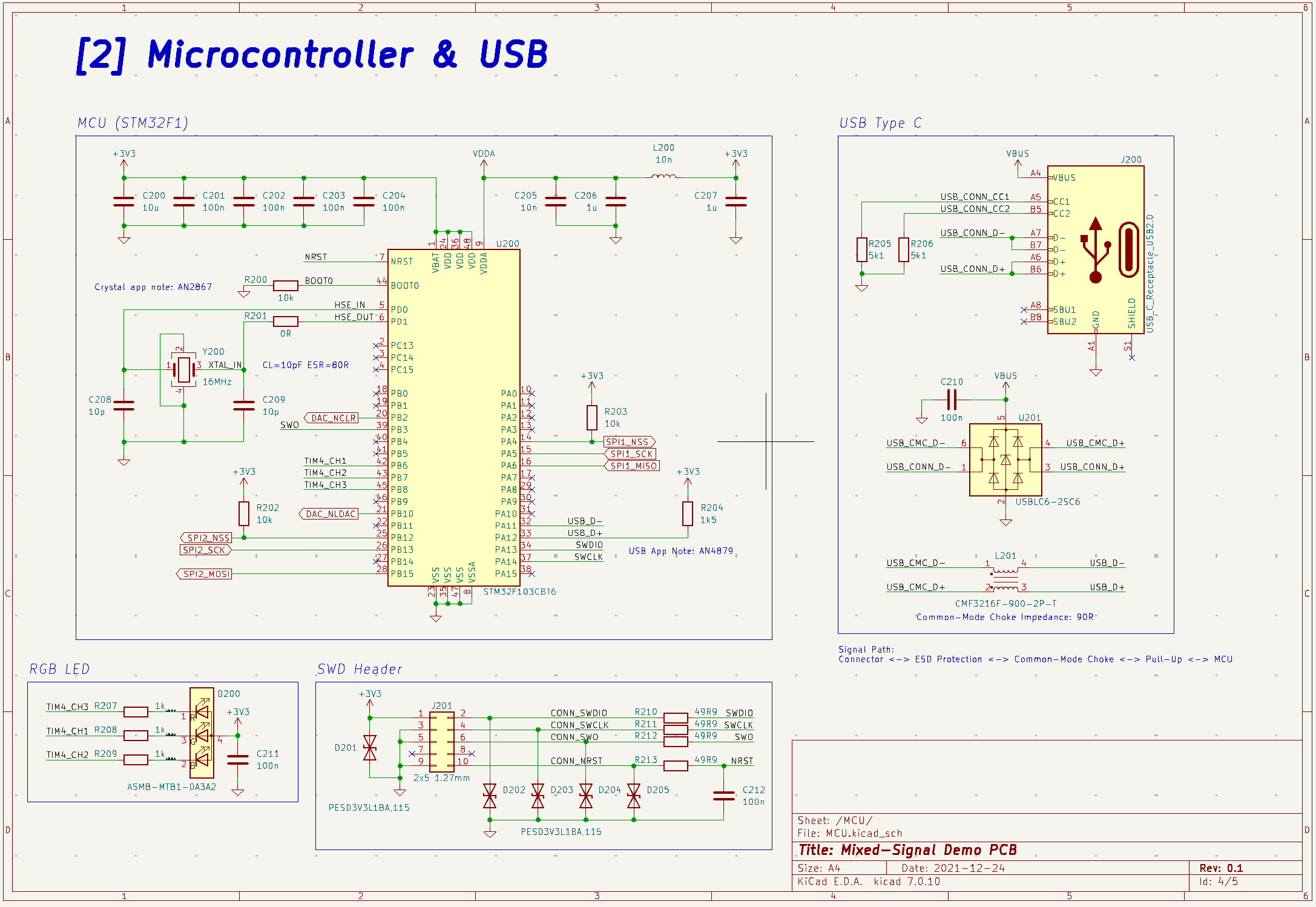
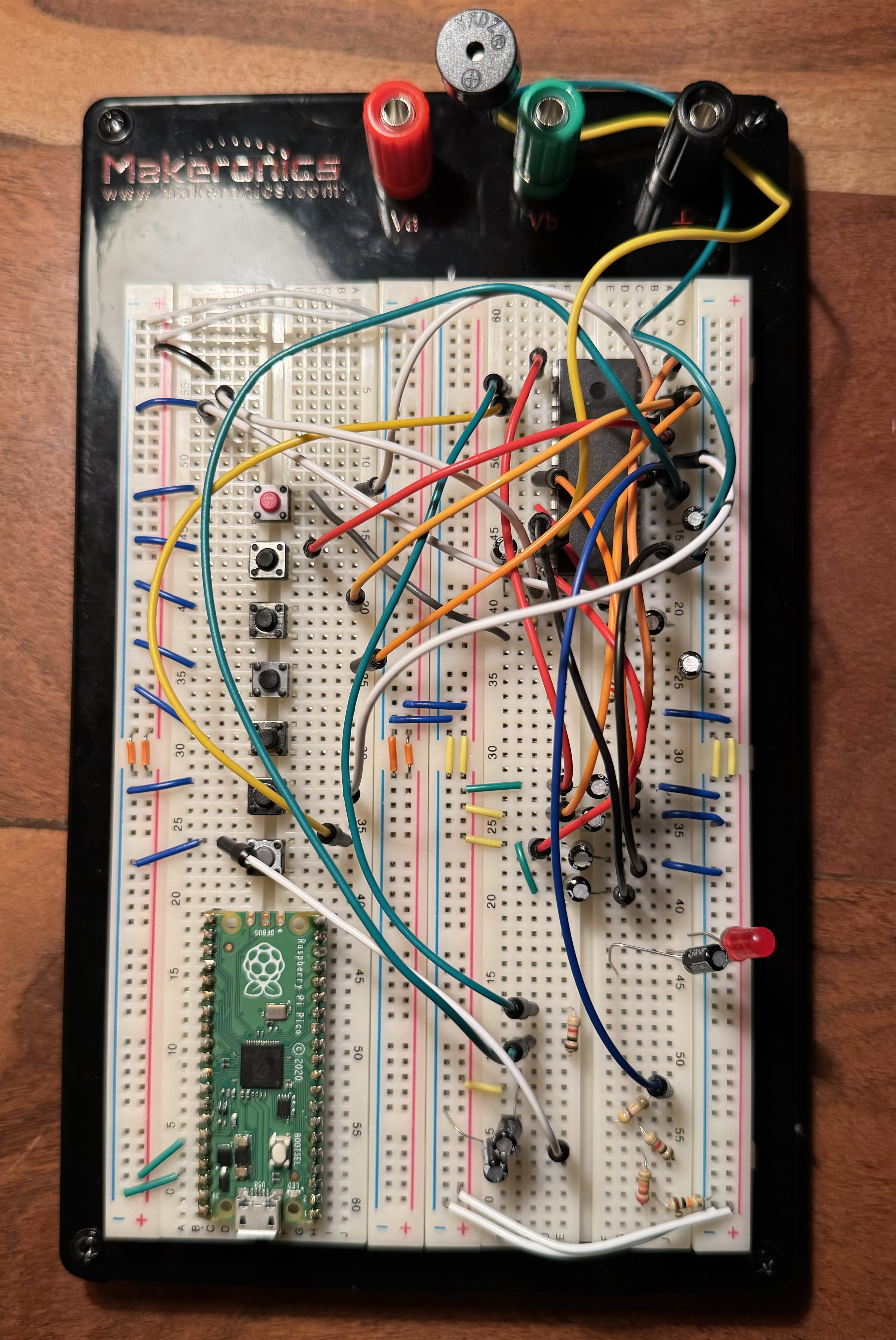
Firmware development focuses on bare-metal real-time audio processing using timer-triggered ADC sampling, DMA-based double buffering,
and deterministic interrupt scheduling in STM32CubeIDE. Digital signal processing algorithms—including soft-clipping distortion,
equalization, and filtering—are implemented in C using the CMSIS-DSP library on a Cortex-M4 FPU platform. The system targets a 48 kHz
sample rate with sub-5 ms end-to-end latency to preserve instrument responsiveness.
This platform serves as a practical environment for developing embedded firmware architecture, hardware-software co-design, signal
integrity practices, and real-time performance analysis while producing a functional guitar effects processor from schematic to
working prototype.
Bare-Metal Firmware
Real-Time DSP
DMA & Interrupts
STM32 Embedded
CMSIS-DSP
Mixed-Signal PCB
ADC/DAC Interface
Signal Integrity